Hardware Overview
The Dropbear robot is a fully open-source platform designed for accessibility and performance. The hardware is a mix of 3D-printed parts, off-the-shelf components, and custom-designed mechanics to create a capable and cost-effective humanoid.
Key Sub-Assemblies
The robot is broken down into several key modular components. This allows for easier assembly and maintenance.

Head Assembly
Vision system housing with stereo cameras and compute module.
Key Components:
- Jetson Orin AGX
- Stereo cameras
- IMU
- Cooling system
Est. Print Time
12 hours
Material
PETG
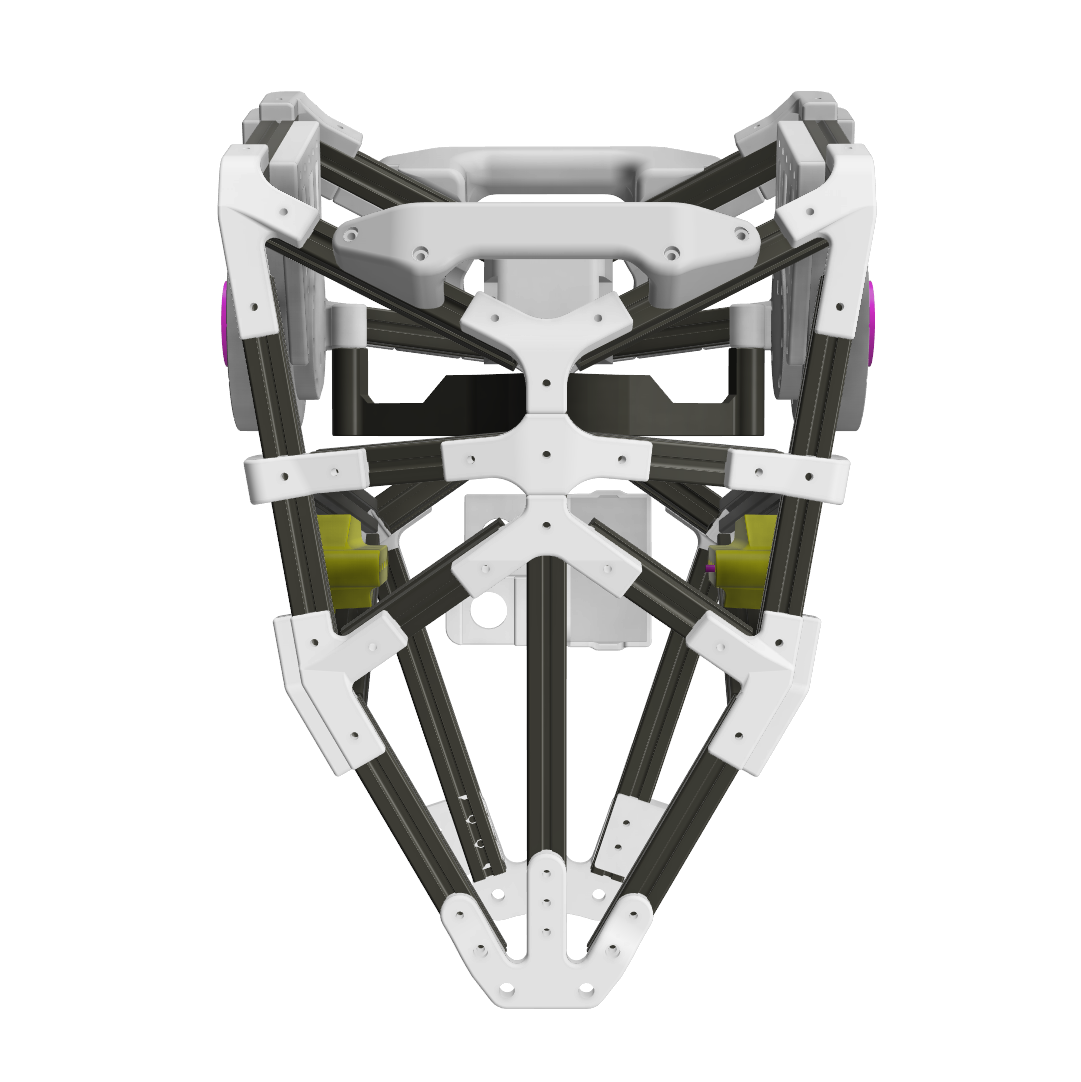
Torso & Spine
The central structure, providing core strength and housing for power systems.
Key Components:
- Power Distribution Board
- Carbon Fiber Spine
- Battery Housing
- Main Wiring Harness
Est. Print Time
20 hours
Material
PETG / ABS

Arm Assembly
6-DOF arms powered by high-torque quasi-direct drive actuators for precise motion.
Key Components:
- QDD Actuators (x6)
- Carbon Fiber Links
- Internal Wiring
- Gripper Mount
Est. Print Time
25 hours (per arm)
Material
PLA+ / PETG
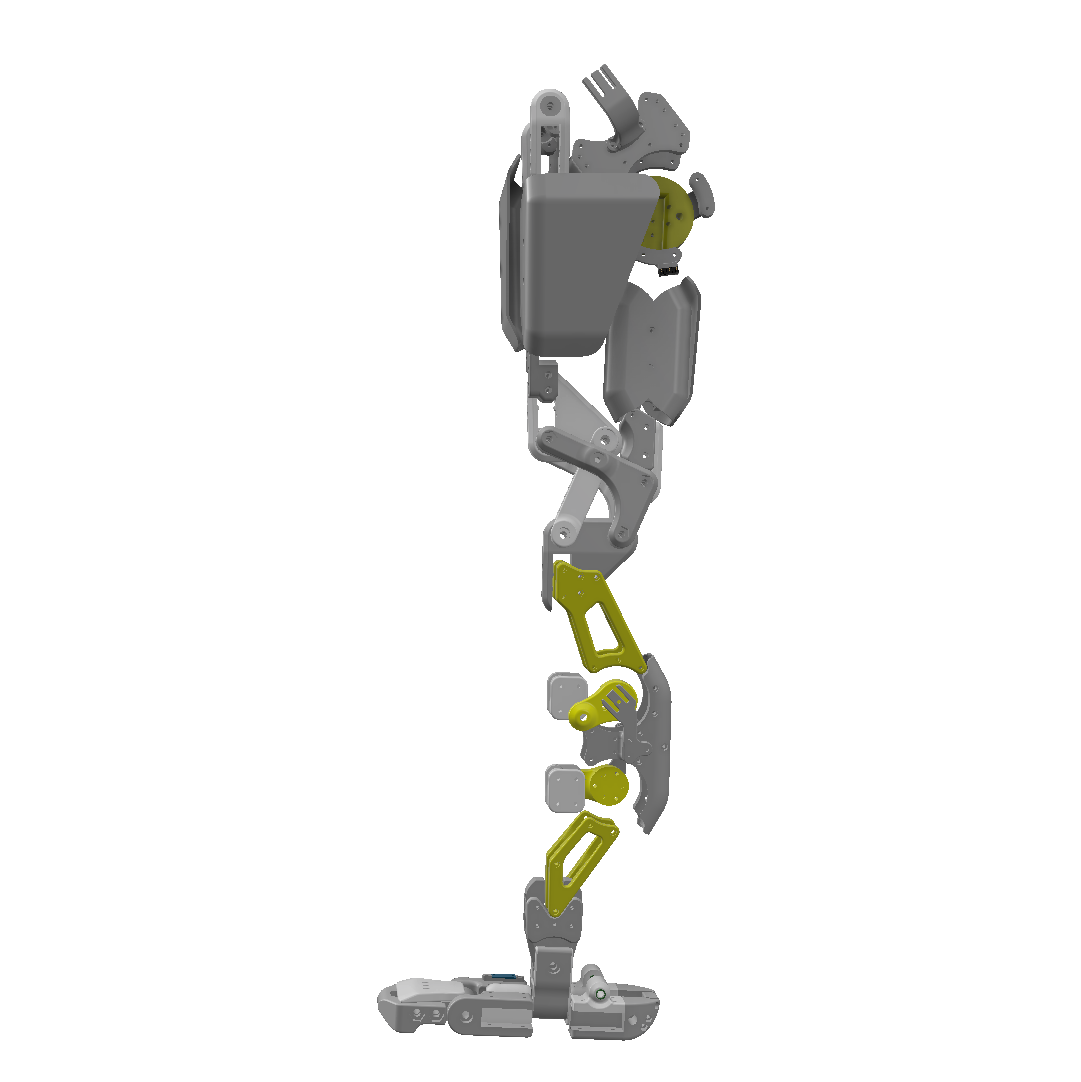
Leg Assembly
Designed for stable bipedal locomotion with powerful actuators at the hip, knee, and ankle.
Key Components:
- High-Torque Actuators (x6)
- 4-Bar Linkage Knee
- Foot with Force Sensors
- Carbon Fiber Links
Est. Print Time
30 hours (per leg)
Material
PETG / Carbon Fiber PETG
Bill of Materials (BOM)
We maintain a comprehensive Bill of Materials that includes all necessary components, from screws and bearings to motors and sensors. This includes links to suppliers to make sourcing parts as easy as possible. For the full list, please see the official documentation on our GitHub.
View Full BOM on GitHub